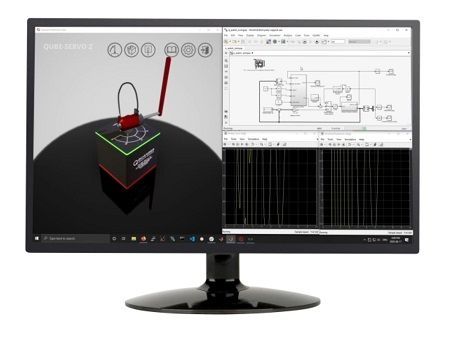
Quanser QUBE™-Servo 2 - лабораторная установка

Это полностью интегрированный модульный лабораторный экспериментальный серводвигатель, предназначенный для обучения основам мехатроники и управления на уровне бакалавриата.
Это полностью интегрированный модульный лабораторный экспериментальный серводвигатель, предназначенный для обучения основам мехатроники и управления на уровне бакалавриата.
Интегрируя разработанную Quanser технологию вычислительного интерфейса QFLEX 2, QUBE-Servo 2 обеспечивает большую гибкость лабораторных конфигураций с использованием ПК или микроконтроллеров, таких как NI myRIO , Arduino и Raspberry Pi . С включенными всеобъемлющими учебными материалами вы можете создать современную учебную лабораторию для студентов для своих курсов по мехатронике или управлению, а также вовлечь студентов в различные проекты по проектированию и завершению.
Основные характеристики
Интегрируя разработанную Quanser технологию вычислительного интерфейса QFLEX 2, QUBE-Servo 2 обеспечивает большую гибкость лабораторных конфигураций с использованием ПК или микроконтроллеров, таких как NI myRIO , Arduino и Raspberry Pi . С включенными всеобъемлющими учебными материалами вы можете создать современную учебную лабораторию для студентов для своих курсов по мехатронике или управлению, а также вовлечь студентов в различные проекты по проектированию и завершению.
Функциональные особенности
- Компактная и интегрированная поворотная сервосистема
- Интерфейс модуля быстрого подключения без инструментов
- Коллекторный двигатель постоянного тока с прямым приводом
- Оптический энкодер высокого разрешения
- Встроенный усилитель напряжения со встроенными датчиками тока и тахометра
- Интегрированное устройство сбора данных (DAQ)
- Гибкий вычислительный интерфейс QFLEX 2 для соединений USB и SPI/QBus
- Управляемый пользователем трехцветный светодиод
- Легко подключаемые кабели и разъемы
- Открытая архитектура, позволяющая пользователям создавать собственные контроллеры
- Полная совместимость с MATLAB® / Simulink® и LabVIEW ™ .
- Полностью документированные системные модели и параметры для MATLAB®/Simulink®, LabVIEW™
- Примеры микроконтроллеров и спецификация интерфейса предоставлены для QUBE-Servo 2 Embedded
С помощью данного модуля возможно изучение следующих тем:
Модуль инерционного диска
- Аппаратная интеграция
- Фильтрация
- Моделирование переходного процесса
- Моделирование блок-схем
- Оценка параметров
- Моделирование частотной характеристики
- Моделирование в пространстве состояний
- Идентификация трения
- Анализ стабильности
- Системы второго порядка
- Устойчивость Рауса-Гурвица
- Стабильность Найквиста
- ПД-контроль
- Свинцовый компенсатор
- Пропорциональный контроль
- Установившаяся ошибка
- Нарушение нагрузки
- Надежность
- Оптимальный контроль
- Введение в цифровое управление
- Дискретная стабильность
- Введение в дискретное управление
Маятниковый модуль
- Момент инерции
- Маятниковое моделирование
- Моделирование в пространстве состояний
- Маятниковый контроль баланса
- Управление поворотом вверх
- LQR контроль баланса с обратной связью по состоянию
- Контроль баланса состояния и обратной связи при размещении полюсов
Основные характеристики
| Характеристики QUBE – Servo 2 | |
| Размеры (Ш х Д х В) | 10,2 см х 10,2 см х 11,7 см |
| масса | 1,2 кг |
| Масса инерционного диска | 0,054 кг |
| Маятниковая масса | 0,100 кг |
| Длина маятника (от оси до кончика) | 9,5 см |
| Разрешение энкодера двигателя и маятника (неквадратурное декодирование) | 512 имп/оборот |
| Номинальное входное напряжение двигателя постоянного тока | 18 В |
| Номинальный ток двигателя постоянного тока | 0,54 А |
| Номинальная скорость двигателя постоянного тока (без нагрузки) | 4050 об/мин |
| Разъемы: | |
| – QFLEX 2 USB |
Стандартный разъем USB 2.0 |
| – QFLEX 2 Embedded |
SPI |
| – QFLEX 2 NI myRIO | A/B |